گونه های مختلف عدم تعادل یا نابالانسی
در این مقاله قصد داریم راجع به گونه های مختلف عدم تعادل صحبت کنیم. نابالانسی را می توان به طور کلی عدم توزیع یکنواخت جرم یک قطعه حول محور دوران آن دانست. اگرچه، عدم تعادل جرمی را شرایطی دانست که در آن محور چرخش (Shaf Axis) و محور مرکزی (Centeral Princiapl Axis) با هم تطبیق نکند. محور مرکزی Principal محوری است که وزن روتور حول آن به طور یکنواخت توزیع شده است. محور Principal و محور شافت زمانی که روتور بالانس کامل باشد یکی خواهند بود. در مورد روتور خارج از بالانس، محور Princaipl جای دیگری قرار خواهد داشت.
گونه های عدم تعادل جرمی می توانند با توجه به رابطه موقعیت مکانی محور شافت و محور Principal به چهار نوع تقسیم شوند:
۱– استاتیک
۲– کوپله (Couple)
۳– استاتیک و کوپله که به آن Quasi-Static می گویند
۴– دینامیک
عدم تعادل استاتیک
نابالانسی استاتیک وضعیت عدم تعادلی است که در آن محور Principal موازی محور شافت است، مانند شکل زیر این نوع عدم تعادل گاهی Force Unbalance و یا عدم تعادل سینتیک (Kinetic Unbalance) نامیده می شود.
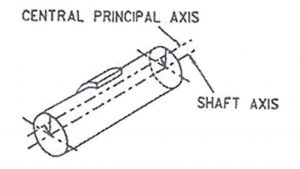
عدم تعادل استاتیک را می توان با قرار دادن قطعه روی لبه های چاقوی موازی، و توجه به این مسئله که در اثر نیروی جاذبه سمت سنگین تر روتور به طرف پایین خواهد چرخید، شناسایی کرد(مانند عملکرد بالانس گرانشی). موقعی که روتور در حال کار است، عدم تعادل استاتیک با مشاهده ی زوایای فاز مساوی در طرفین روتور مشخص خواهد شد
عدم تعادل کوپله
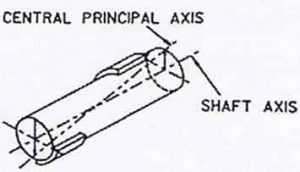
عدم تعادل کوپله شرایطی است که در آن محور Principal با محور شافت در مرکز ثقل روتور تلاقی می کند. همان طور که در شکل ۴-۱۴ دیده می شود یک عدم تعادل کوپله وقتی دو نقطه ی سنگین برابر در طرفین محور مرکزی در دو انتهای روتور قرار دارند به وجود می آید.
برخلاف عدم تعادل استاتیک عدم تعادل کوپله را نمی توان با قرار دادن قطعه روی تیغه های چاقو شناسایی کرد. عدم تعادل کوپله فقط با مشاهده ۱۸۰ درجه اختلاف فاز ارتعاشات در طرفین روتور در حین کار قابل شناسایی خواهد بود.
عدم تعادل استاتیک و کوپله
تنها در موارد بسیار محدودی ممکن است روتور، تنها عدم تعادل استاتیک یا کوپله داشته باشد. معمولا یک روتور Unbalance مقداری از هر دو نوع عدم تعادل را خواهد داشت. این ترکیب را عدم تعادل Quasi – Static می نامند. شکل ۴-۱۵ یک وضع عدم تعادل Quasi- Static را نشان می دهد. محور Principal محور شافت را قطع می کند ولی نه در مرکز ثقل روتور. اختلاف این نوع عدم تعادل با نوع کوپله در آن است که وزنه های طرفین روتور با هم برابر نیستند. این نوع عدم تعادل سبب می شود میزان دامنه ی ارتعاشات در طرفین روتور باهم اختلاف قابل ملاحظه ای داشته و ۱۸۰ درجه هم اختلاف فاز داشته باشند.
وب سایت در حال تکمیل است
لطفا برای کسب منابع بیشتر در مورد گونه های مختلف عدم تعادل برایمان در واتس آپ بنویسید.